
J’avais cette idée en tête depuis un bon moment, les composants pour le faire étaient dispo, la faisabilité contrôlée mais je n’avais pas pris le temps de m’y mettre.
Voilà chose faite.

Objectif :
Modifier le pupitre de contrôle un rotor Yaesu G2000 pour permettre l’adjonction d’une fonction de commande a distance pour un trafic en remote.
Plus simplement, permettre de faire tourner les antennes sans être au pied du pupitre du rotor, ce qui est le cas lorsqu’on utilise les fonctionnalités nouvelles de prise en main à distance disponibles sur les transceivers récents.
L’autre contrainte que je m’impose est de conserver un pupitre de rotor intègre capable de fonctionner sans la télécommande
A noter que cette réalisation est transposable sur la majorité des rotors avec un peu de réflexion et d’adaptation.
J’avais cherché il y a quelques temps parmi les solutions trouvées sur le net.
Mon choix s’était porté sur la solution open source K3NG qui a été mise en œuvre par TK5EP (entre autres) qui a d’ailleurs assez bien décrit sa réalisation.
Ce soft est extrêmement bien construit et totalement modulaire, il permet de s’adapter à tout ce qui existe sur le marché en choisissant lors de la configuration les modules à activer
TK5EP disposait encore de PCB disponibles, inutile de réinventer l’eau tiède, je lui en commande un exemplaire.
En résumé, voici les fonctionnalités de cette télécommande :
– prise en main a distance selon émulation protocole Yaesu G232B
– Le pupitre peut fonctionner manuellement ou par télécommande
– Pilotage via ethernet
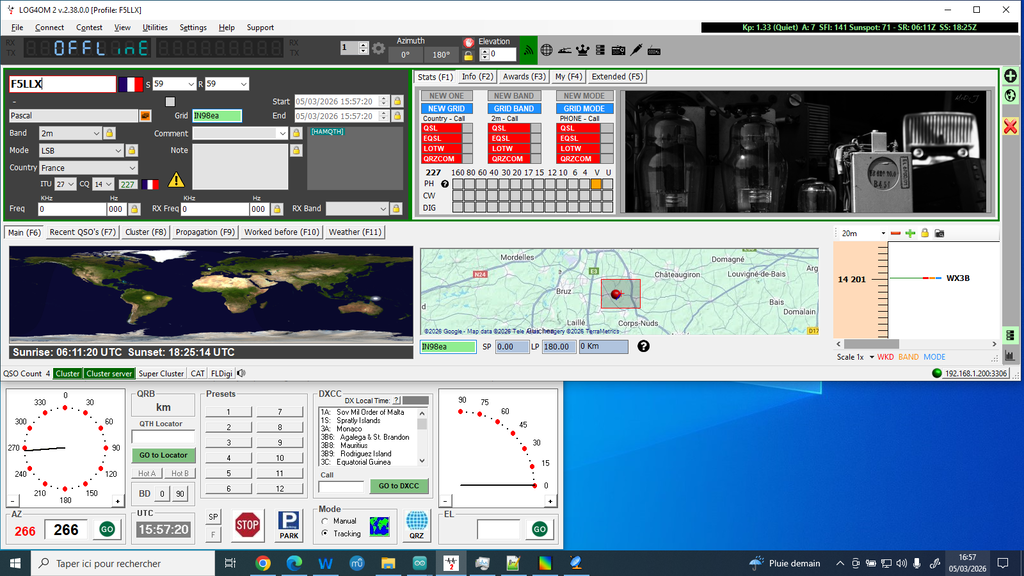
– Utilisation du soft PSTrotator pour la commande du rotor
– Interfaçage automatique avec Log4om2 qui selon l’indicatif choisi pointera l’antenne directement dans la bonne direction
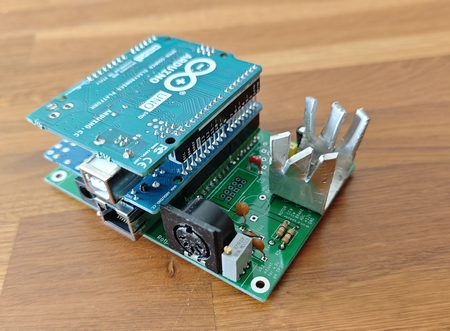
Les composants de la réalisation
– Un arduino Uno
– Un shield Ethernet
– La carte de TK5EP ou équivalent
– Une carte relais maison pour intégration dans le contrôleur Rotor Yaesu
Le schéma principal
Voici le schéma de la partie principale de cet interface Remote.
La partie relais n’est pas dans ce schéma

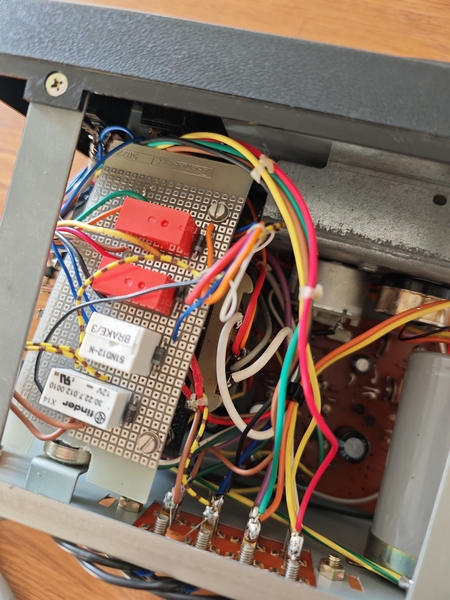
Première étape, ajouter l’interface relais et une prise remote dans le contrôleur.
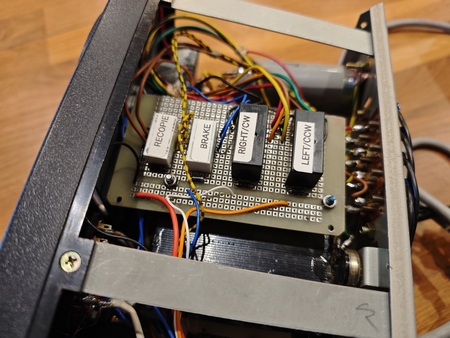
Cet interface est composé de relais :
– 1 Left CCW simulant l’appui sur la touche correspondante
– 1 Right CW simulant l’appui sur la touche correspondante
– 1 Brake pour Bloquer ou débloquer le Frein
– 1 Gestion de la recopie. A l’origine, le potentiomètre de recopie est géré à partir de l’alimentation du contrôleur sur des entrées différentielles d’ampli opérationnels. Pour l’utilisation de la télécommande, il est nécessaire d’avoir une tension de recopie qui soit au maximum à 5V et avec une référence de masse due l’interface.
Pour cela, j’ai fait transiter les pattes du potentiomètre par un relais double qui découple le potentiomètre lorsque le cable remote est connecté pour que la tension de recopie soit entre 0 et 5V maxi. Dans mon cas entre 0 et 3.6V.
Pour cette réalisation unitaire une plaque à trous, quelques bouts de fils et un peu de cervelle feront l’affaire.

Assemblage de la carte
Deuxième étape, Assemblage de la carte TK5EP qui comporte une alimentation stabilisée 5V quelques résistances et condensateurs, 3 transistors de commande des relais situés dans le contrôleur.
J’ai simplifié au plus car je n’ai pas besoin d’afficheur n’étant pas devant le boitier.
Chargement du logiciel
Troisième étape, chargement du sketch et paramétrage.
C’est là que cela se complique car il faut avant tout comprendre la philosophie de l’auteur mais une fois que c’est acquit c’est relativement simple.
Il y a dans le soft une phase de calibration qui permet de calibrer les butées du potentiomètres (valeur min et max de tension de recopie) on indique quelques paramètres comme : Le 0 est au nord ou au sud, la plage de rotation et le tour est joué.
Une autre contrainte, le concepteur recommande un arduino Mega, TK5EP a réussi a tout rentrer dans un Uno… C’est chaud, une fois tout compilé, il reste 250 a 300b de libre…
Lors de premiers essais, je suis confronté à un mauvais positionnement de l’antenne qui ne pointe pas sur le cap demandé.
Un relevé de mesure de la tension de recopie me montre rapidement un problème de linéarité de la courbe du potentiomètre.
Question posée à K3NG, pas de problème le logiciel a une option pour gérer cela.
Il convient d’activer une option pour faire intervenir un tableau de conversion que l’on renseigne avec des mesures qu’on effectue tous les x degrés.
Même si je reconnais qu’il est difficile de tout comprendre d’un soft à la simple lecture sur un Github, a force de perséverance et à l’aide d’une fonction debug très utile et quelques conseils de K3NG, j’ai fini par m’en sortir.
La mise au point
J’ai quand même connu quelques galères parmi celles ci, mon contrôleur n’était pas cablé comme sur la doc constructeur…cela ne s’invente pas.
Autre galère, un mauvais choix initial de relais de commande qui a fait que l’un d’entre eux à fini par rester collé. Du coup, je ne tournait que dans un sens.
J’ai du refaire la carte relais intégrée dans le contrôleur.
Pour finir, le dessin et l’impression d’un petit boitier pour intégrer cette logique Lan To Rotator

Quel confort de pouvoir depuis son PC à partir d’un indicatif, le taper dans le log et voir l’antenne s’orienter automatiquement sur le bon cap.
Si certains sont tentés par l’aventure, n’hésitez pas à me faire signe, je suis passé par quelques galères chronophages que je peux vous éviter.
Si demande, je réaliserai un petit document tuto pour indiquer les étapes de cette réalisation .
73
Pascal